E hoʻouna i ka nīnau no ka ʻike a me ke kumu kūʻai o ka Robot Laser Cutting Machine!
/

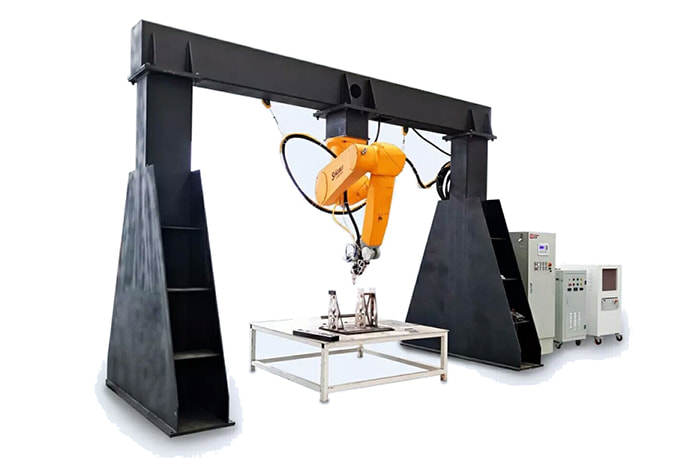
3D mīkini ʻoki laser
- ʻOki Laser Fiber me ka Pūnaehana Pūnaehana Robotic.

ʻO Robot 3D Laser Cutting Machine Highlights
1. XR160L no kaʻu hui e hoʻonohonoho ana i ka ʻoihana kaʻa kaʻa metala hoʻoheheʻe ʻia i ka ʻoihana-specific robot, nā mea hana e nā ʻōnaehana robot Stäubli RX160L, IPG500W fiber laser, LASERMECH laser head (me ka neʻe ʻana), ka papa hoʻonohonoho, chiller, palekana a me nā mea nui ʻē aʻe.
2. 6-axis linkage, kahi ākea o ka hana, a hiki i kahi lōʻihi, hiki ke lawe i ka ukana, hiki i ka wahi hana no ka ʻoki track 3D.
3. Paʻa, lima lima lima, ʻoiai i loko o nā kūlana koʻikoʻi, kaohi ʻana i nā wahi he nui, hiki nō ke hoʻokō i ka hana kiʻekiʻe.
4. Hiki ke hoʻololi i ka wikiwiki o ke kaʻina hana a me ka hoʻonohonoho ʻana, e hoʻokō i ka pololei o ka hana ʻana, ka hua kiʻekiʻe, a me ka wikiwiki kiʻekiʻe.
5. ʻO ka walaʻau haʻahaʻa, lōʻihi ka wā mālama maʻamau, lōʻihi ke ola lawelawe
6. Hiki ke hoʻohana ʻia ka manipulator ma o ka pahu lima
7. Ma ka hoʻololiʻana i ka papahana a me ka hoʻololiʻana i nā lakohana, hiki ke hoʻokō i kaʻokiʻana i ka laser, ka laser welding, ka hoʻopiliʻana, ka lawelaweʻana a me nā hana'ē aʻe
Nā hiʻohiʻona mīkini ʻoki ʻoki laser 3D

1.Laser kumu: ka hoʻohanaʻana i ka IPG fiber lasers kiʻekiʻe, ka maikaʻi kiʻekiʻe, ke kumu kūʻai haʻahaʻa o ka hoʻohana hoʻohui.
2. ʻO ka hoʻokō ʻana i ka ʻoki ʻana i ka laser o nā keʻena hoʻokō no ka robot Swiss Staubli. ʻO Staubli robot ka lopako pololei loa o ka ʻoihana lopako. ʻO ka hoʻohana ʻana i ka alumini titanium alloy robot body, harmonic reducer design, ke kino robot e pili ana i nā hōʻailona ʻē aʻe, māmā, wikiwiki, kiʻekiʻe kiʻekiʻe. ʻO nā lopako ʻoihana TL160L i ka curvature liʻiliʻi o ka ʻoki maikaʻi a me ke ʻano nui e haʻi i ka ʻoki laser e pili ana i nā hōʻailona ʻē aʻe he mau pono maikaʻi. I ka ʻoki ʻoki laser kiʻekiʻe, hiki i ka ʻōnaehana robots Staubli ke hoʻokō i ka wikiwiki o 18 m / min me ka ʻole o ka jitter, ʻaʻole hiki ke hōʻoia i nā hōʻailona ʻē aʻe i ka wikiwiki o ka ʻoki ʻana i ka laser o 10 m / min e hōʻoia i nā hopena ʻoki maikaʻi. Ma ka ʻoki liʻiliʻi liʻiliʻi, hiki iā ʻoe ke ʻoki i ke anawaena liʻiliʻi o 2mm liʻiliʻi liʻiliʻi, ʻokiʻoki i ka hopena maʻalahi a nani hoʻi, ʻaʻole hiki ke hana ʻia nā mea ʻē aʻe o nā robots ʻoihana.
3.Staubli lopako hiki ke hoʻonohonoho 'ia e like me ka maoli pono o nā mea kūʻai mai waho-line polokalamu polokalamu, ka lako polokalamu hiki ke heluhelu i ka ekolu-dimensional palapala lako polokalamu ma na wahi a pau vda, igs, x_t, sldprt, prt, par a me na formats, pololei i loko o ka lako polokalamu compiler track kaʻina hana, Ke aʻoʻana, maʻalahi a me ka pono e hoʻokō i ka huahana o ka hana papahana.
4. E hahai i ke poʻo ʻokiʻoki laser robot: koho me nā poʻomanaʻo kiʻekiʻe o ka honua o ke poʻo ʻoki ʻoki laser e hōʻoia i ka paʻa mau ʻana o ka kukuna laser i ke kūlana kikoʻī e hōʻoia i ka hopena ʻoki.
5.Auxiliary air blowing system: hoʻohui ka ʻōnaehana kiʻekiʻe puʻe ea, nitrogen, oxygen ʻekolu kinoea kumu hoʻolālā a me ka kiʻekiʻe a me ka haʻahaʻa voltage hoʻololi kino ala ala, hiki i ka mea kūʻai ke koho e like me ke kaʻina hana pono koi a me ke kumukūʻai o ke kinoea kōkua.
6.Lubrication System: Ua hoʻolakoʻia ka mīkiniʻokiʻoki laser 3d me kahi pūnaewele lubrication manual, e ho'ēmi i kaʻaʻahu o nā'āpana neʻe, e hōʻoia i ka wikiwiki kiʻekiʻe o ka mīkini laser pūnaewele holoʻokoʻa.
ʻO Robot Fiber Laser Cutting Machine Hana wikiō
ʻO Robotic Arm 3D Laser Cutting Machine ma ka Pūnaewele Kūʻai



Robotic Arm 3D Laser Cutting Metal Tubes a me ka Laʻana Pepa Metala

Makemake ʻoe e ʻike hou aku e pili ana i ka Robot Laser Cutter?
Mea Hana & Hana Hana
Hoʻopili ʻia i nā ʻano paipu metala like ʻole a me ka ʻoki ʻoki laser metala, kūpono no ka ʻoihana kaʻa, ka hana ʻana i ka mold, nā lako kīhini, nā huahana metala, e like me ka ʻoki ʻoki ʻana.
1. No nā uhi metala kaʻa a me nā ʻāpana chassis a me nā ʻāpana liʻiliʻi o ka hana ʻana, e like me ka mākeke mālama, nā kaʻa, nā kaʻa, nā mīkini hana, nā kaʻa i hoʻololi ʻia a pēlā aku.
2. Me ka hana maʻalahi o ka mīkini ʻokiʻoki laser, ma kahi o ka wehe ʻana i ka stamping, kūpono no ka hana pilikino, akā pōkole hoʻi i ka pōʻai hoʻomohala huahana, pane wikiwiki i ka mākeke.
3. Me ka ʻōnaehana ʻoki laser robot, ma kahi o ka ʻoki ʻana i ka plasma paʻa lima, e hoʻomaʻamaʻa nui i ke kaʻina hana, akā ua hoʻopilikia pū ʻia e nā mea hana plasma o ka mea hana i ka hoʻokele ʻana i ka pilikia.
4. ʻO ka huina haʻahaʻa haʻahaʻa o nā mea hana, ka hoʻohana ʻana i ke kumu kūʻai haʻahaʻa, ka maikaʻi kiʻekiʻe, nā lawe ʻē aʻe o ka mīkini ʻoki laser ʻelima axis, mālama nui i ke kumukūʻai o kēlā me kēia mea hana.
5. He kūpono no ka hale hana hoʻokipa e kākoʻo ana i ka lako pūʻulu liʻiliʻi mua, a me nā huahana ʻē aʻe e hoʻonui i ka hiki ke hana ma hope o ke kahakaha ʻana o ka mold, hoʻomohala ʻia e hoʻemi i ka pilikia o ka hoʻopukapuka.
Nā ʻāpana ʻenehana mīkini
ABB2400 Robotic Arm Main Technical Parameters
| Ka helu o nā koi o ka lopako | 6 | Haawe axis ono | 20Kg |
| Lopako crane | 1.45m | Kūlana hou | 0.05mm |
| Kaumaha | 380Kg | Voltage | 200-600V, 50/60Hz |
| Hoʻohana mana | 0.58Kw | mana helu ʻia | 4KVA/7.8KV |
| ʻO ABB 2400 Robot gantry mīkini ʻokiʻoki ʻenehana ʻenehana | |||
| Nā palena holoʻokoʻa o nā mea hana | |||
| Ka nui o ka papahele (mxm) | e pili ana i 3 * 4.2 (me nā chillers a me ka ʻōnaehana hoʻomaloʻo hau kiʻekiʻe) | ||
| Kiʻekiʻe papa hana | 350mm | walaau | <65 Db (ʻaʻole me ka peʻahi hoʻopau) |
| Pono lako mana | AC220V±5% 50HZ (Maʻalahi) | Mana piha | 4.5KW (me ka ʻole o ka ea) |
| Pono kaiapuni | ʻO ke ana wela: 10-35 ℃ Ka palena haʻahaʻa: 40-85% 1000 mika ma lalo o ka ʻilikai, ka hoʻohana ʻana i ke kaiapuni me ka ʻole o ke ahi, pahū, ikaika magnetic, ōlaʻi ikaika. | ||
| ʻO nā palena nui o ke kumu laser | |||
| ʻAno laser | Laser fiber | ||
| Hana nā lasers | Hoʻomau / modulation | Mana laser | 700W (1000w 2000w 3000w koho) |
| ʻano kiko | ʻAno-nui | Ka lōʻihi hawewe laser | 1070nm |
| Pūnaehana kōkua | |||
| Pūnaehana hoʻoluʻu | ʻO ka pāpaʻi pālua pālua me ka ʻōnaehana hoʻomaʻemaʻe (hoʻonohonoho kūʻokoʻa) | ||
| Pūnaehana hoʻoluʻu puna laser | 350W ea ea ākea (hoʻonohonoho kūʻokoʻa) | ||
| Pūnaehana kinoea kōkua | ʻEkolu kumu kinoea kinoea puʻe pālua (hoʻonohonoho kū hoʻokahi) | ||
| Ke poʻo ʻoki laser | ʻO ka manaʻo hoʻokō kaha | ||
Nā huahana pili
-

RN16 / RN18 / RN26 (ABB X2400D/X2400L / Staubli XR160L)
Multifunction 3D Robot Laser Cutting Machine No ka Pepa Metala A ʻOki ʻia ʻo Tube Metal -

VR16 / VR18 / VR24
Fiber Laser Robot Arm 3D Cutting Tube a me ka paipu no nā ʻāpana kaʻa -

RE16 / RE18 / RE26
Pūnaewele mīkini ʻoki ʻoki ʻo Robot
E hoʻouna i kāu leka iā mākou:
E kākau i kāu leka ma aneʻi a hoʻouna mai iā mākou