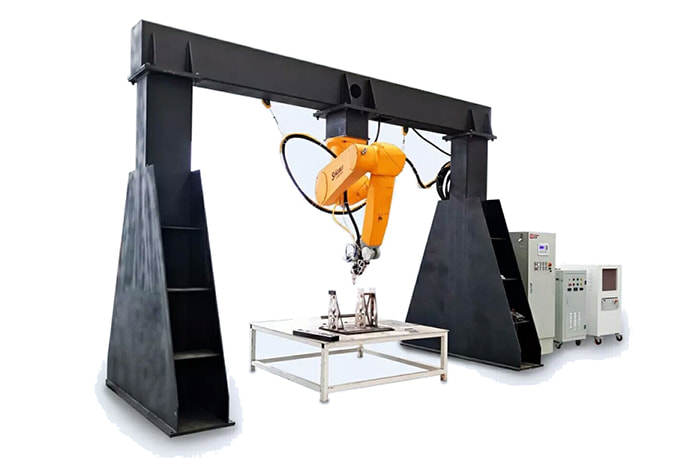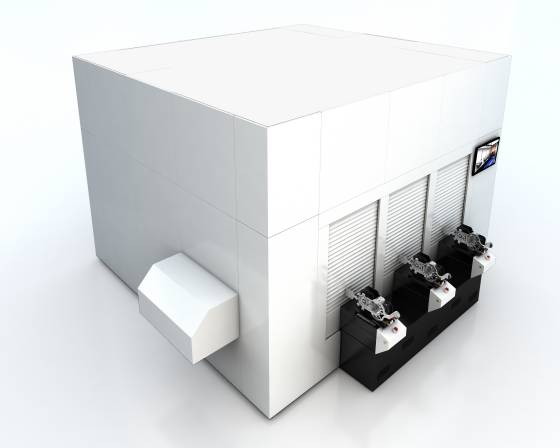
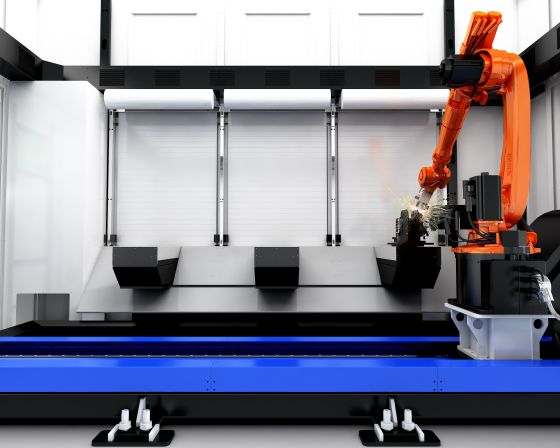

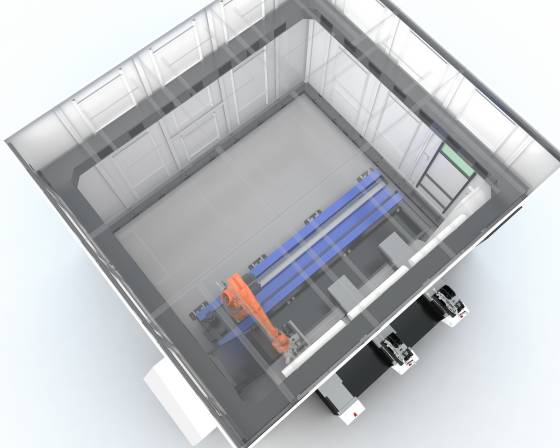
Robot Laser schneiden Maschinnparameter
| Mark vu Roboter | Zou- | Zou- | Yaskawa | Abb | Kriaks- |
| Robot Aarmaart | R2000ic | M20ib | Gp25 | Irb2600 | Kr20 r1810 |
| Bewäerte Handgelenk Last | 165 kg | 25 kg | 25 kg | 12 kg | 20 kg |
| Schafft Radius | 26555M | 1850mm | 1730MM | 1850mm | 1810mm |
| Installatiounsmethod | Formell, no uewen, Wénkel | Formell, no uewen, Wénkel | Filfière | Formell, no uewen, Wénkel | Formell, no uewen, Wénkel |
| Vergréissert Mësshandlung Genauegkeet | ± 0.2mm | ± 0,15mm | ± 0.1mm | ± 0.2mm | ± 0.2mm |
| Widderhuelen | ± 0.05mm | ± 0.02mm | ± 0.02mm | ± 0.04M | ± 0.04M |
| Konfiguréiere Laser Kraaft | 1000w-20000w | 1000w-6000w | 1000w-6000w | 1000w-3000w | 1000w-6000w |
PS: Déi uewe genannte Roboter. Aner Zorte vu Roboter a verbonnen Accessoiren kënnen no de Clientsnopt ausgewielt ginn. Montéiert weg d'Verkafs Team fir d'Detailer.